


Doly awtomatlaşdyrylan Gün Panellerini Arassalaýjy Robot
Önümiň düşündirişi
Özboluşly ýalpyldawuklyga garşy gizlin görüş sensory dizaýny robotyň hatda güýçli hapalanmada ýa-da ýagty yşykda hem ýerleşýän ýerini anyk kesgitlemegini üpjün edýär we fotoelektrik modullarynyň ýokary takyklyk bilen ýerleşdirilmegine mümkinçilik berýär.
Robotyň öz Al görme ulgamy hiç hili meýdan üýtgetmesi bolmazdan, modulyň ýüzünde millimetr derejesinde ýerleşýän ýerini kesgitlemegi üpjün edip biler. Adam gözegçiligi bolmazdan, ol kämil arassalamak awtomatizasiýasyny üpjün etmek üçin özbaşdak duýup, meýilleşdirip we karar kabul edip biler.
Göterip bolýan fotoelektrik arassalaýjy robotyň önümiň 6 esasy aýratynlygy bar:
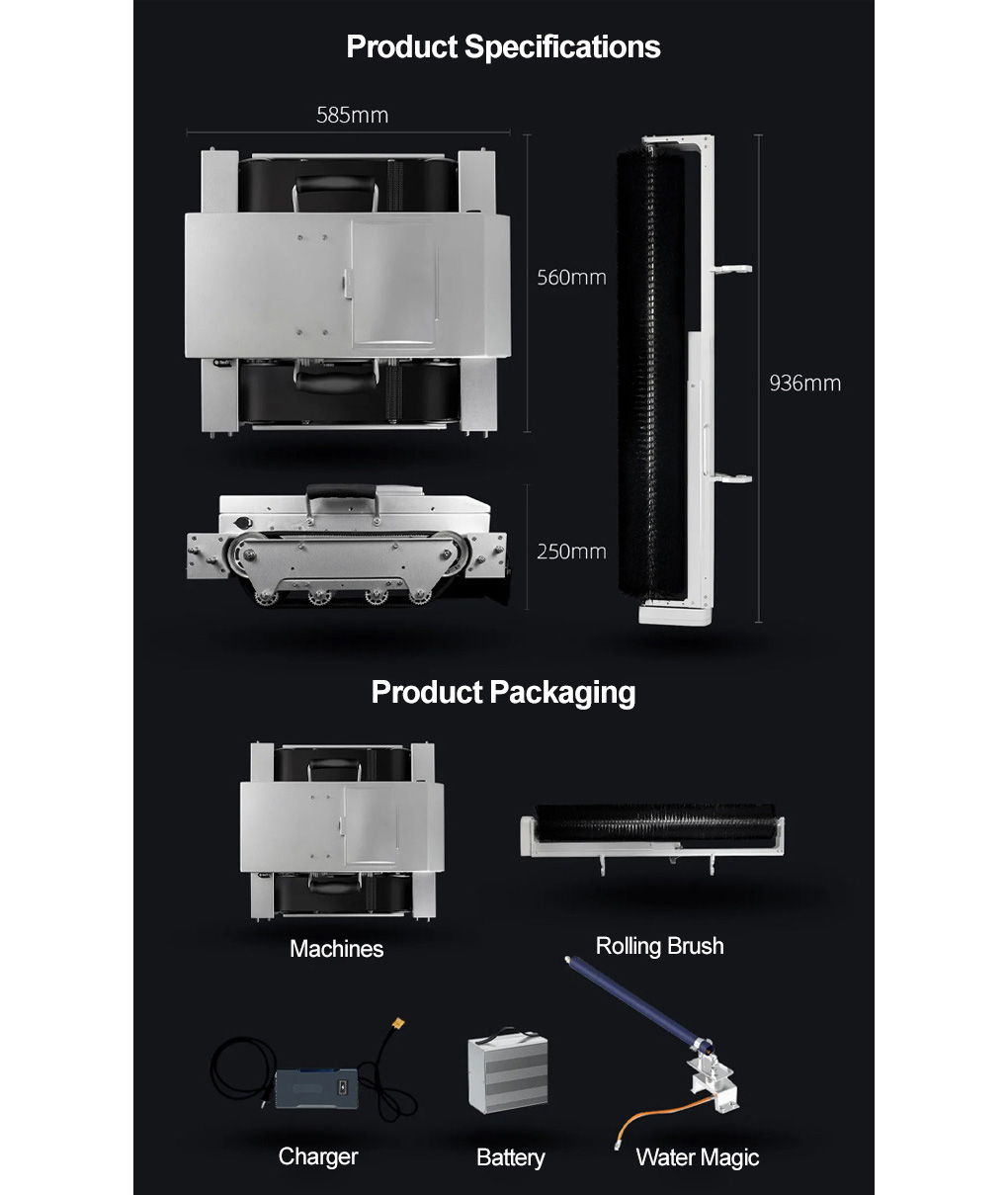
1, Batareýany çalşyp bolýar we batareýanyň ömrü aladasyz
2 litium batareýasy bilen işleýän ýeke robot tutuş maşynyň 2 sagatlap üznüksiz işlemegini üpjün edip bilýär. Ok gysgyjy görnüşli çalt sökülýän dizaýn, çydamlylyk wagty aňsatlyk bilen uzaldylýar.
2, Gije arassalaýyş Pes güýç bilen awtomatiki gaýtaryş
Arassalaýjy robot gijelerine arassalaýyş işlerini howpsuz ýerine ýetirip, pes kuwwatlylyk bilen awtonom ýerleşdirilip uçuşa gaýdyp bilýär. Gündiz elektrik stansiýasynyň önümçiligine täsir etmeýär, ulanyjynyň energiýa öndüriş netijeliligini ep-esli ýokarlandyrýar.
3, Ýeňil we göterilýän panel 0 ýük
Aerokosmos materiallarynyň innowasion ulanylmagy, tutuş maşynyň ýeňil dizaýny, arassalaýyş prosesinde fotoelektrik paneliň zeperlenmeginiň öňüni almak üçin. Ýeňil gurluş dizaýny ulanyjylaryň işlemeginiň agyrlygyny azaldýar we bir adam bir wagtyň özünde onlarça maşyny çalt ýerleşdirip we dolandyryp bilýär, arassalaýyş çykdajylaryny tygşytlaýar we iş netijeliligini netijeli ýokarlandyrýar.

4, Bir açar başlangyç aýlawy Akylly meýilnamalaşdyryş ýoly
Akylly roboty düwmä basmak bilen işe girizip bolýar. Robotyň massiwiň gyrasyny anyklap, burçuny awtomatiki sazlap bilmegi, iň gowy we netijeli arassalamak ýoluny garaşsyz hasaplamagy, ýitirmezden toplumlaýyn örtügi üpjün etmek üçin içine ornaşdyrylan sensorlar bilen enjamlaşdyrylan ýörite aýlanýan arassalamak režimi.
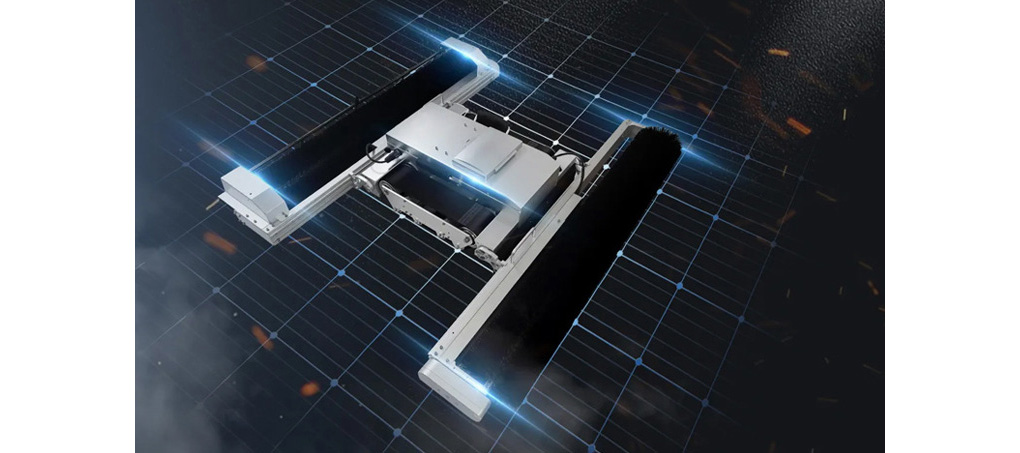
5, dürli egri ýüzlere uýgunlaşmak üçin adsorbsiýa tapgyrlaýyn ýöremek
Robot hereketlenýän sorujy gaplar arkaly fotoelektrik panelleriň ýüzüne ýakyndan siňýär we kömekçi sorujy gaplaryň tapgyrlaýyn paýlanyşy oňa dürli çylşyrymly iş şertlerine uýgunlaşyp, 0-45° aralygynda tekiz ýapgytlarda has durnukly ýöremäge mümkinçilik berýär.
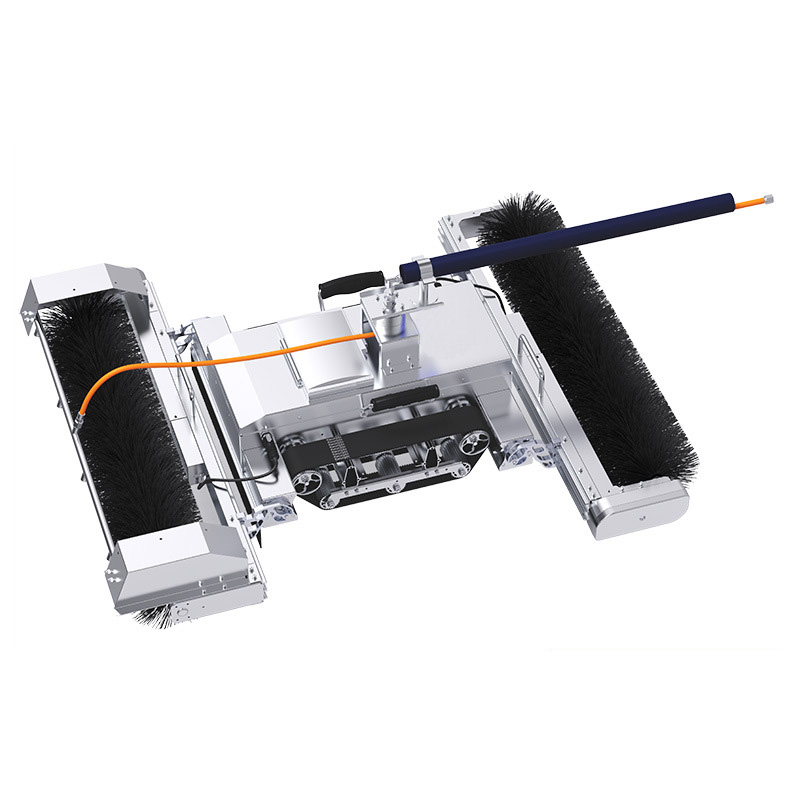
6, turboşarjly nano suwsuz arassalamak has ajaýyp
Bir arassalaýjy enjam garşylykly ugurlarda aýlanýan iki sany nanofiber rolikli çotga bilen üpjün edilen, olar ýüzde siňen tozan bölejiklerini ýygnap, turboşarjly merkezden gaçyryjy wentylýatoryň merkezden gaçyryjy güýji arkaly derrew tozan gutusyna sorulmak üçin ýygnap bilýär. Şol bir ýeri gaýtalamagyň zerurlygy ýok, suw sarp etmezden arassalamak, daşky gurşawy goramak we energiýany tygşytlamak üçin.



-

Telefon
-

E-poçta
-

Whatsapp
-

Ýokarky